Jungil Ham
Ph.D. Candidate in Mechanical and Robotics Engineering

Gwangju, South Korea. 61005
Jungil Ham is pursuing a Ph.D. in Mechanical and Robotics Engineering at the Gwangju Institute of Science and Technology (GIST). His research focuses on visual localization, mapping, and orientation estimation for robots operating in complex environments, including space robotics, indoor aerial platforms, and structurally constrained scenes.
He designed highly accurate visual compasses leveraging structural priors in stair-dominant environments and digital twins of the International Space Station (ISS). During his master’s studies, he also led the end-to-end development of a pedestrian-following aerial robot, from drone design and fabrication to perception and control algorithms.
Jungil has conducted research through internships at Sungkyunkwan University and the Korea Institute of Science and Technology (KIST), where he broadened his perspective on robotics systems, perception, and applied research. He also collaborated closely with the NASA Ames Research Center Intelligent Robotics Group as a research intern. He received his M.S. in Mechanical and Robotics Engineering from GIST and his B.S. in Electronics and Information Engineering from Kwangwoon University.
News
Publications
2025

2024

2023
-
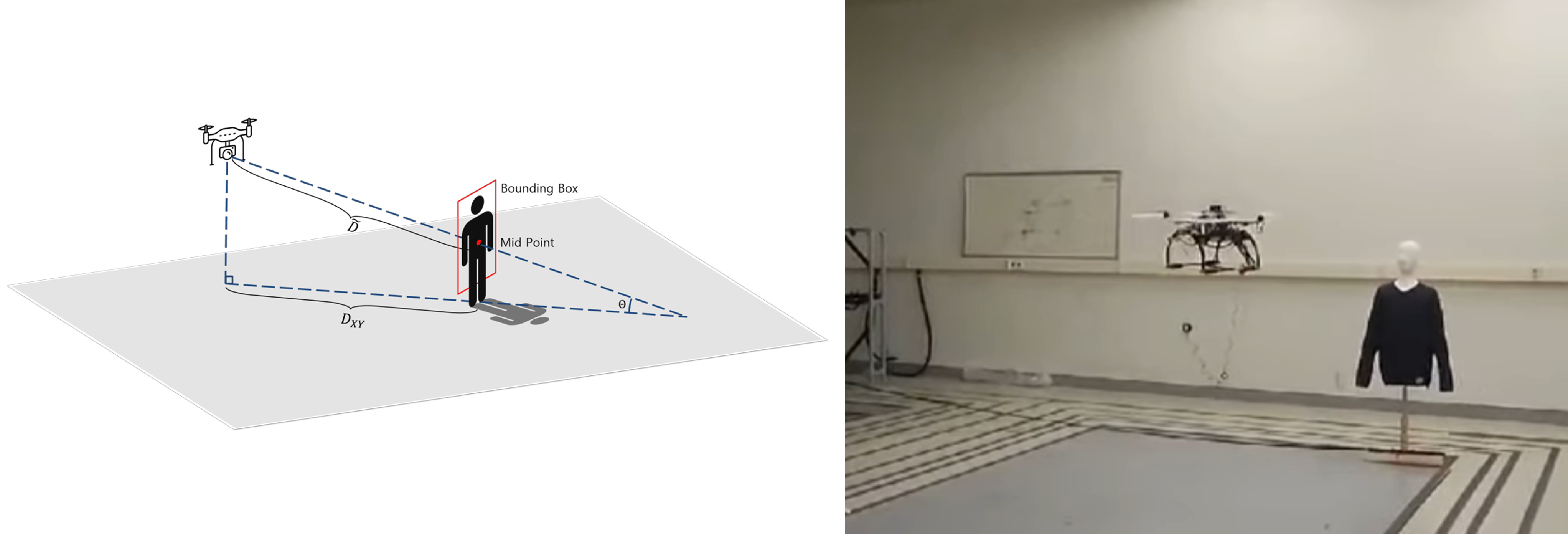 Indoor Pedestrian-Following System by a Drone with Edge Computing and Neural Networks: Part 2-Development of Tracking System and Monocular Depth EstimationIn 2023 23rd International Conference on Control, Automation and Systems (ICCAS), 2023
Indoor Pedestrian-Following System by a Drone with Edge Computing and Neural Networks: Part 2-Development of Tracking System and Monocular Depth EstimationIn 2023 23rd International Conference on Control, Automation and Systems (ICCAS), 2023 -
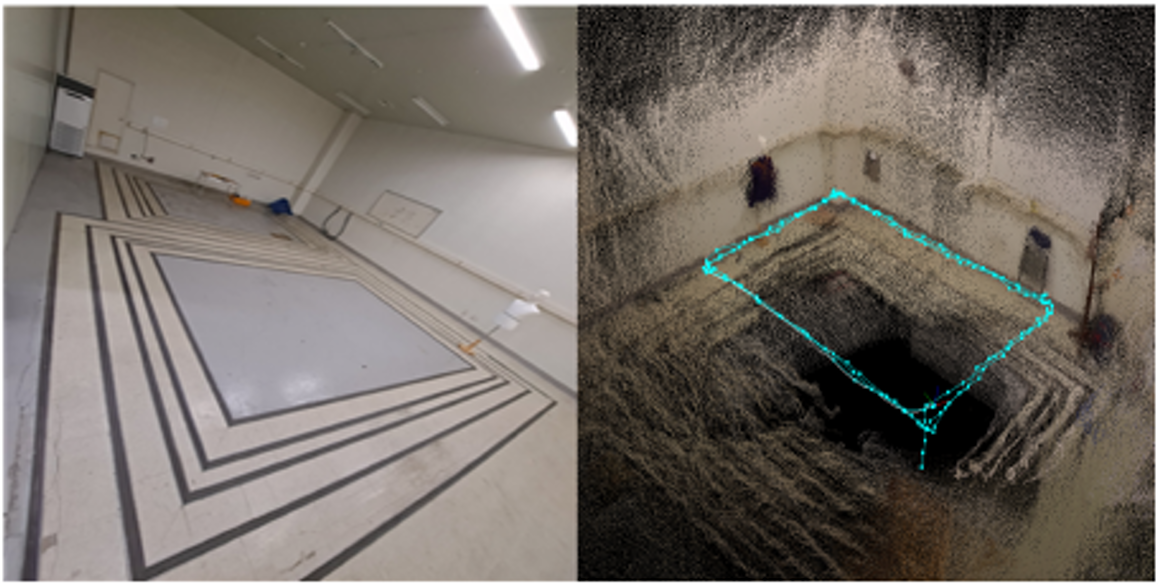 Indoor Pedestrian-Following System by a Drone with Edge Computing and Neural Networks: Part 1-System DesignIn 2023 23rd International Conference on Control, Automation and Systems (ICCAS), 2023
Indoor Pedestrian-Following System by a Drone with Edge Computing and Neural Networks: Part 1-System DesignIn 2023 23rd International Conference on Control, Automation and Systems (ICCAS), 2023

